Image Restoration for inverse problems using Deep Image Prior
Denoising and Inpainting of corrupted images using only architectural priors.
Implemented Deep Image Prior ↗ research paper using U-Net, a deep learning architecture, enabling single-image restoration without a training dataset.
Demonstrated the model on real and synthetic images, achieving high-quality restoration.
Implementation can be found on GitHub ↗.
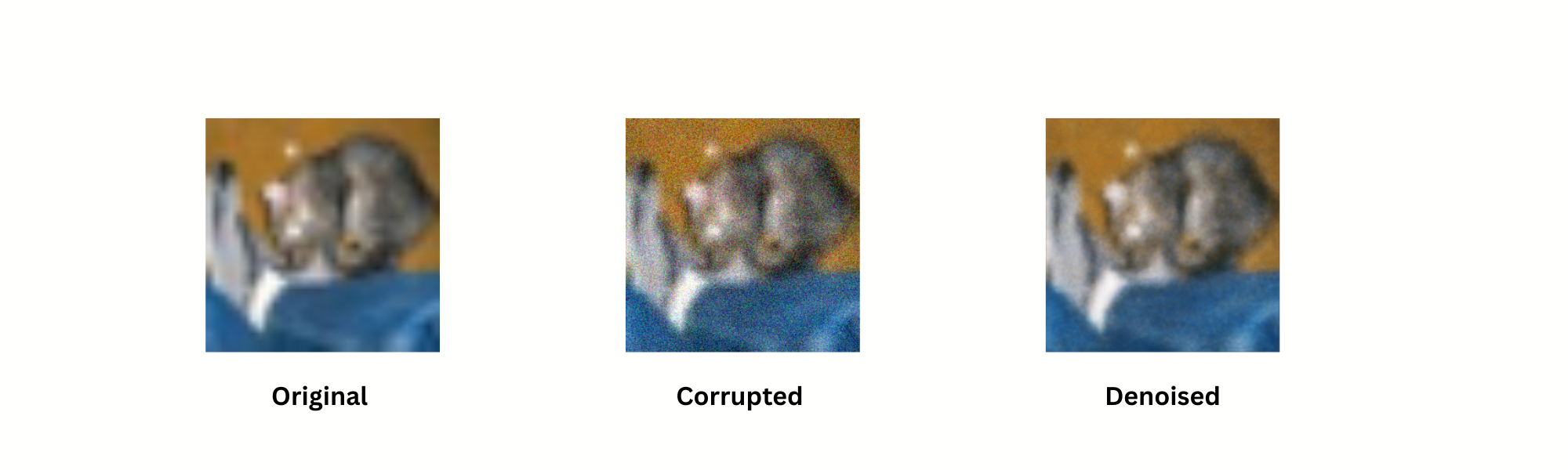
Task: Denoising
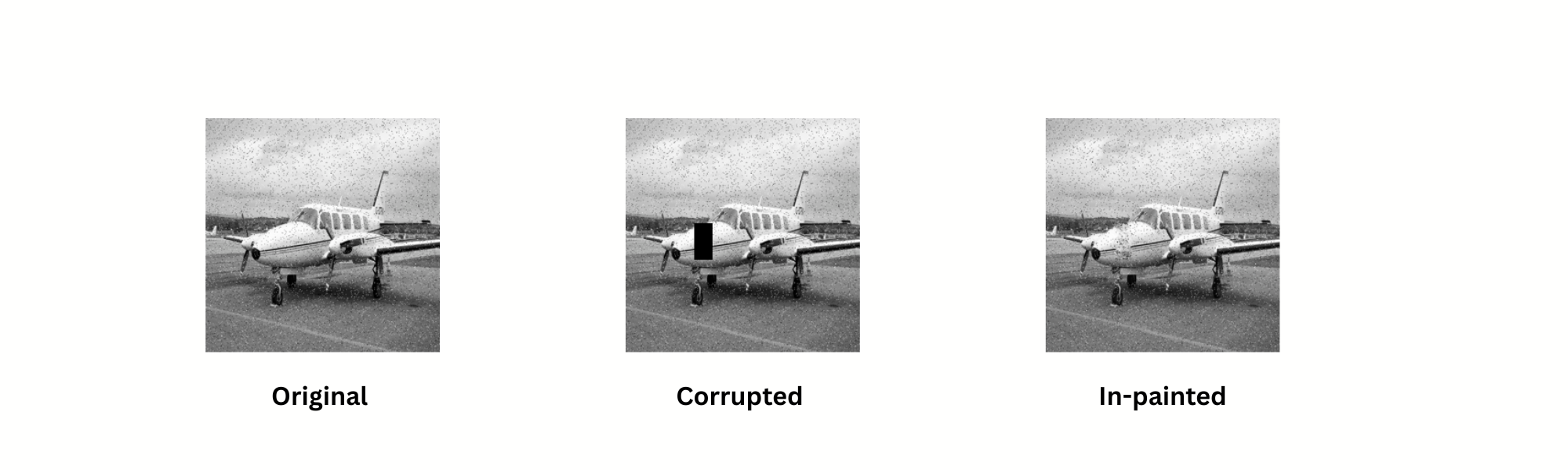
Task: Inpainting